
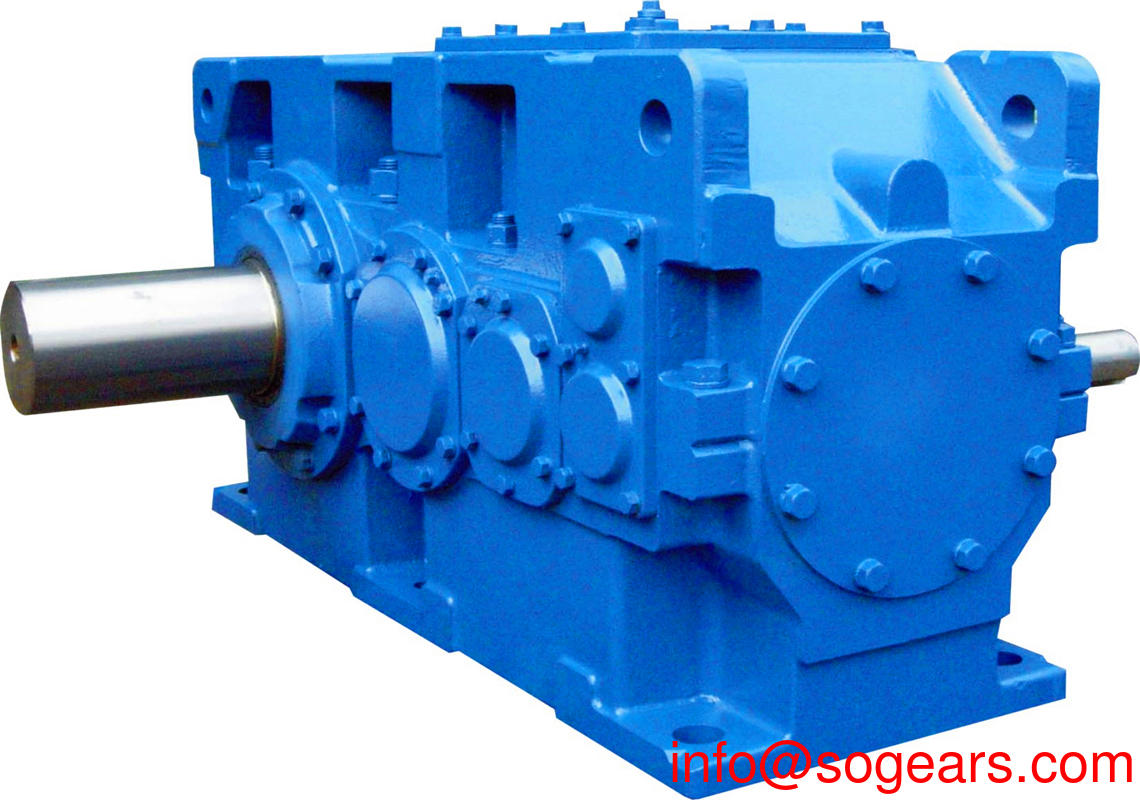
სტეპერიანი ძრავის პლანეტარული გადაცემათა კოლოფი
ის სტეპერიანი საავტომობილო პლანეტარული გადაცემათა კოლოფი იგი ძირითადად აშენებულია მზის სიჩქარით, პლანეტარული გადაცემით, შიდა რგოლებით და პლანეტის გადამზიდავით.
სამი პლანეტის ბორბლის თანაბრად გადანაწილების მიზნით, გამოყენებულია ტატუირებადი მცურავი მექანიზმი, ანუ მზის ჩაქრობა ან პლანეტის გადამზიდავი იფუნქციონირებს, ან მზის გადაადგილება და პლანეტის გადამზიდავი ერთდროულად იფუნქციონირებს. სტეპერიანი ძრავის პლანეტარული გადაცემათა კოლოფი არის სწორი კბილი, რომელიც მოიცავს ცილინდრულ გადაცემებს. აქვს შემდეგი მახასიათებლები:
- მცირე ზომის და მსუბუქი წონა. იმავე პირობებში, ეს არის 1 / 2 ან უფრო მსუბუქია, ვიდრე ჩვეულებრივი ჩართვა ცილინდრული გადაცემათა კოლოფი, და მოცულობა არის 1 / 2 to 1 / 3.
2, გადაცემის ეფექტურობა მაღალია: ერთსაფეხურიანი სტეპერიანი ძრავის პლანეტარული გადაცემათა კოლოფი აღწევს 97% ~ 98%; ორსაფეხურიანი სტეპერიანი ძრავის პლანეტარული გადაცემათა კოლოფი აღწევს 94% ~ 96%; სამსაფეხურიანი სტეპერიანი ძრავის პლანეტარული გადაცემათა კოლოფი 91% ~ 94%.
3, გადამცემი დენის დიაპაზონი დიდია: შეიძლება იყოს ნაკლები 1KW- დან 1300KW ან უფრო დიდი.
4, გადაცემის დიაპაზონი დიდია: i = 2.8 2000
5, ადაპტირება და გამძლეობა. ძირითადი ნაწილები დამზადებულია მაღალხარისხიანი შენადნობის ფოლადისაგან კარბუიზირებით და ჩაქრობით ან ნიტრაიდებით. სტეპერიანი ძრავის პლანეტარული გადაცემათა კოლოფი მუშაობს შეუფერხებლად, დაბალი ხმაურით და გამოიყენება 10 ჯერზე მეტჯერ.
6, გამოყენების და მოქმედი პირობები

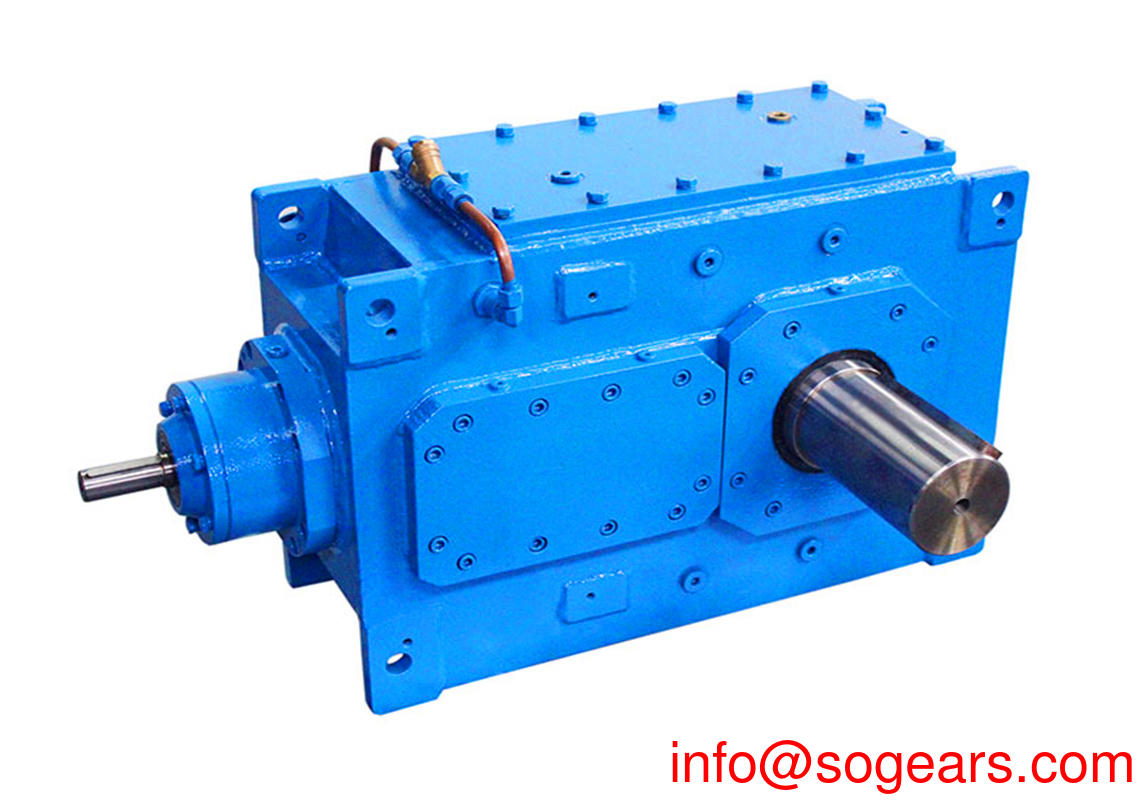
ის სტეპერიანი საავტომობილო პლანეტარული გადაცემათა კოლოფი აქვს სამი ჰორიზონტალური სერია (NGW11-NGW121) და ორი დონე (NGW42-NGW122) სამი (NGW73-NGW123). იგი ძირითადად გამოიყენება მეტალურგიაში, სამთო, აღმართსა და სატრანსპორტო აპარატებში და მოწყობილობებში, ასევე შეიძლება გამოყენებულ იქნას ელექტროენერგიის გადაცემისთვის სხვა ანალოგიური სამრეწველო და სამთო მოპოვების პირობებში.


სერვო პლანეტარული გადაცემათა კოლოფი გადაცემათა კოლოფის კოეფიციენტი 18000 RPM– ით (სტეპერიანი ძრავის პლანეტარული გადაცემათა კოლოფი თავისთავად ზომაა, რაც უფრო დიდია სტეპერიანი ძრავის პლანეტარული გადაცემათა კოლოფი, უფრო ნაკლებია შეყვანის სიჩქარე უფრო მაღალი) ზემოთ, ინდუსტრიული დონის სერვოპლანეტარული გადაცემათა კოლოფი გამომავალი ბრუნვის დროს ზოგადად არ აღემატება 2000 nm, სპეციალური დიდი ბრუნვის სერვო პლანეტარული გადაცემათა კოლოფი შეუძლია გააკეთოს მეტი 10000 ნმ. სამუშაო ტემპერატურა 25 ℃– დან 100 ℃ ან დაახლოებით ასეა, ნაცრის შეცვლით შეიძლება შეიცვალოს მისი სამუშაო ტემპერატურა.
სერვო პლანეტარული გადაცემათა კოლოფის სამუშაო ტემპერატურა ძირითადად –25 ℃ –დან დაახლოებით 100 ℃ –მდეა. შეყვანის მაქსიმალური სიჩქარე შეიძლება მიაღწიოს 18000rpm სამუშაო პერიოდს. შეყვანის სიჩქარეზე დაგროვილი სამუშაო დრო არის zbj19004-88 და zbj19026-90 ხმაური ≤70 db
კატალოგი
1 სტეპერიანი ძრავის პლანეტარული გადაცემათა კოლოფი
2 ინსტალაციის მეთოდი
3 მნიშვნელოვანი პარამეტრი
კონცეფცია 4
სტეპერიანი საავტომობილო პლანეტარული გადაცემათა კოლოფი

გადამცემი ძირითადი სტრუქტურა არის: პლანეტის ბორბალი, მზის ბორბალი, გარეთა გადაცემის რგოლი.სხვა შემცირების სიჩქარესთან შედარებით, სერვოძრავის შემცირების სიჩქარეს აქვს მაღალი სიმტკიცე, მაღალი სიზუსტე (ერთ ეტაპზე შესაძლებელია 1 წერტილზე ნაკლები მიღწევა), (ორმაგ სტადიას შეუძლია 3 ქულაზე ნაკლები მიღწევა), მაღალი გადაცემის ეფექტურობა (ერთჯერადი ეტაპი 95-99% -ში) , მაღალი ბრუნვის / მოცულობის თანაფარდობა, სიცოცხლის შენარჩუნების უფასო მახასიათებლები.
ამ მახასიათებლების გამო, სერვოპლანეტარული გადაცემათა კოლოფი ძირითადად დამონტაჟებულია სტეპერ ძრავასა და სერვოძრავას ან ფუნჯის ძრავაში, გამოიყენება სიჩქარის შესამცირებლად, ბრუნვის გასაუმჯობესებლად, შესაბამისი ინერციისთვის.
სერვოპლანეტარული გადაცემათა კოეფიციენტის სიჩქარის შეყვანის სიჩქარემ შეიძლება მიაღწიოს 18000rpm– ს (რაც ეხება სტეპერიანი ძრავის პლანეტარული გადაცემათა კოლოფის ზომას, რაც უფრო დიდია სტეპერიანი საავტომობილო პლანეტარული გადაცემათა კოლოფი, უფრო დიდია შეყვანის სიჩქარე შეფარდებაზე მეტი), წარმოების მუქი ბრუნვის ინდუსტრიული კლასის სერვოპლანეტარული გადაცემათა კოლოფი ზოგადად არ აღემატება 2000Nm

ინსტალაციის მეთოდი
სტეპერიანი ძრავის პლანეტარული გადაცემათა კოლოფის სწორი ინსტალაცია, გამოყენება და შენარჩუნება მნიშვნელოვანი რგოლია მექანიკური აღჭურვილობის ნორმალური მუშაობის უზრუნველსაყოფად.ამიტომ, სტეპერიანი ძრავის პლანეტარული გადაცემათა კოლოფის დამონტაჟებისას, გთხოვთ, დარწმუნდეთ, რომ მკაცრად დაიცავით შემდეგი საკითხების ინსტალაცია და გამოყენება, ყურადღებით შეიკრიბეთ და გამოიყენეთ.
პირველი ნაბიჯი არის იმის დადასტურება, რამდენად კარგია ძრავა და სტეპერიანი ძრავის პლანეტარული გადაცემათა კოლოფი ინსტალაციამდე და მკაცრად შეამოწმეთ შეესაბამება თუ არა თითოეული ნაწილის ზომა, რომელიც უკავშირდება ძრავას და სტეპერ ძრავას, პლანეტარული გადაცემათა კოლოფი. აქ მოცემულია პოზირების უფროსის, შეყვანის ლილვისა და სტეპერ ძრავის პლანეტარული გადაცემათა კოლოფის სიჩქარის ზომა და შესაბამისი ტოლერანტობა.
ნაბიჯი 2: გახსენით ხრახნიანი სტეპერიანი ძრავის პლანეტარული გადაცემათა კოშკის გარე მტვრის გარე მტვერზე, დაარეგულირეთ PCS სისტემის დამაგრების რგოლი, რომ გასწორდეს მტვერსასრუტიანი ხვრელის გვერდითი ხვრელი, ჩადეთ შიდა ექვსკუთხედი გამკაცრდეს.ამის შემდეგ, ამოიღეთ საავტომობილო ლილვის გასაღებები.მესამე ნაბიჯი არის სტეპერიანი ძრავის პლანეტარული გადაცემათა კოლოფის ბუნებრივი დაკავშირება.სტეპერიანი საავტომობილო პლანეტარული გადაცემათა კოლოფის გამომავალი შახტის კონცენტრაცია და ძრავის შეყვანის ლილვი უნდა იყოს თანმიმდევრული, როდესაც დაკავშირებულია, ხოლო ორსულის გარე ფარანი პარალელური უნდა იყოს.თუ კონცენტრირება არ არის თანმიმდევრული, ძრავის ლილვი დაირღვევა ან სტეპერიანი ძრავის პლანეტარული გადაცემათა კოლოფი ეცვა.გარდა ამისა, ინსტალაციის დროს არ გამოიყენოთ ჩაქუჩი და სხვა დარტყმა, შეუშალეთ ღერძი ან რადიალური ძალა ზედმეტად დიდ ზიანს აყენებს ტარების ან სიჩქარეს.


დარწმუნდით, რომ გამკაცრეთ საყრდენი ძალის ჭანჭიკის გამკაცრებამდე.ინსტალაციამდე, გაწურეთ საავტომობილო შეყვანის ლილვის საწინააღმდეგო ჟანგის საწინააღმდეგო ზეთი, განლაგება უფროსთან და სტეპერიანი საავტომობილო პლანეტარული გადაცემათა კოლოფის ნაწილის დამაგრება ბენზინით ან თუთიით-ნატრიუმის წყლით.მისი მიზანია უზრუნველყოს ოპერაციის მჭიდრო კავშირი და მოქნილობა და თავიდან აიცილოს ზედმეტი აცვიათ.საავტომობილო და სტეპერიანი ძრავის პლანეტარული გადაცემათა კოლოფის შეერთებამდე, საავტომობილო ლილვის გასასვლელი უნდა იყოს პერპენდიკულურად, რათა გამკაცრდეს ჭანჭიკი.ერთგვაროვანი ძალის უზრუნველსაყოფად, პირველ რიგში დააინსტალირეთ სამონტაჟო ჭანჭიკები დიაგონალზე, ნებისმიერ დიაგონალურ მდგომარეობაში, მაგრამ არ დააჭიროთ მჭიდროდ, შემდეგ მიამაგრეთ ინსტალაციის ჭანჭიკები დანარჩენ ორ დიაგონალურ მდგომარეობაში და ბოლოს მიამაგრეთ ოთხი სამონტაჟო ჭანჭიკი სათითაოდ.დაბოლოს, გამკაცრეთ ძალის ჭანჭიკი.ყველა დამაგრების ხრახნი უნდა დაფიქსირდეს და შემოწმდეს ბრუნვის ფირფიტის ხელით მითითებული ბრუნვის მონაცემის მიხედვით.
სტეპერ ძრავის პლანეტარული გადაცემათა კოლოფსა და მექანიკურ მოწყობილობას შორის სწორი ინსტალაცია იგივეა, რაც სწორი ინსტალაცია სტეპერ ძრავას პლანეტარული გადაცემათა კოლოფსა და წამყვანი ძრავას შორის.მთავარია უზრუნველყოს სტეპერიანი ძრავის პლანეტარული გადაცემათა კოლოფის გამომავალი ღერძი და ლილვის კონცენტრირების დისკის ნაწილი.
მნიშვნელოვანი პარამეტრი
შენელებისა რაციონი: შეყვანის სიჩქარის თანაფარდობა და გამომავალი სიჩქარე.
სერია: პლანეტარული გადაცემების კომპლექტების რაოდენობა.საერთოდ მაქსიმუმს მიაღწევს სამს, შემცირდება ეფექტურობა.
დატვირთვის სრული ეფექტურობა: სტეპერიანი ძრავის პლანეტარული გადაცემათა კოლოფის გადაცემის ეფექტურობა მაქსიმალური დატვირთვის ქვეშ (ხარვეზის გაჩენის გამომავალი ბრუნვა).
სამუშაო სიცოცხლე: სტეპერიანი ძრავის პლანეტარული გადაცემათა კოეფიციენტი სამუშაო დრო რეიტინგული დატვირთვით და შეყვანის სიჩქარე.
შეფასებული ბრუნვის სიჩქარე: ეს არის ბრუნვის ნიშანი, რომლის ღირებულება ხანგრძლივ ხანგრძლივობას საშუალებას მისცემს.როდესაც გამომავალი სიჩქარეა 100 რ / წთ, სტეპერიანი ძრავის პლანეტარული გადაცემათა კოლოფის სიცოცხლის საშუალო ხანგრძლივობაა, ამ ღირებულების მიღმა, სტეპერიანი ძრავის პლანეტარული გადაცემათა კოლოფის საშუალო სიცოცხლე შემცირდება.სტეპერიანი ძრავის პლანეტარული გადაცემათა კოლოფი მარცხდება, როდესაც გამომავალი ბრუნვის რაოდენობა ორჯერ აღემატება.
ხმაური: ერთეული dB (A), ეს მნიშვნელობა არის შეყვანის სიჩქარე 3000 სთ / წთ, დატვირთვის გარეშე, 1 მ დაშორებით სტეპერიანი ძრავის პლანეტარული გადაცემათა კოლოფი იზომება გაზომვის მნიშვნელობა.

სერია: პლანეტარული გადაცემების სიმრავლეების რაოდენობა. იმის გამო, რომ პლანეტარული გადაცემების ერთი ნაკრები ვერ აკმაყოფილებს გადაცემის უფრო დიდი რაციონის მოთხოვნებს, ზოგჯერ ორი ან სამი ნაკრები საჭიროა უფრო დიდი გადაცემის კოეფიციენტის მხარდაჭერის მოთხოვნების დასაკმაყოფილებლად. პლანეტარული გადაცემათა რაოდენობის გაზრდის გამო, გაიზრდება მეორე ან მესამე სტეპერიანი ძრავის პლანეტარული გადაცემათა კოლოფის სიგრძე და შემცირდება ეფექტურობა.
დაბრუნების კლირენსი: როდესაც გამომავალი დასასრული ფიქსირდება და შეყვანის ბოლოს გარდამავალია საათის ისრის მიმართულებით და ისრის საწინააღმდეგო ისრის საწინააღმდეგოდ, რათა შეყვანილი იყოს შეყვანილი ბრუნვის + -2%, შეყვანის ბოლოში, სტეპერიანი ძრავის პლანეტარული გადაცემათა კოლოფის შეყვანის ბოლოში არის მცირე ზომის კუთხოვანი გადაადგილება. ანაზღაურება
სერვო ძრავა არის ძრავა, რომელიც აკონტროლებს სერვო სისტემაში მომუშავე მექანიკურ კომპონენტებს. ეს არის დამატებითი ძრავის არაპირდაპირი შეცვლის მოწყობილობა.

სერვოძრავას შეუძლია გააკონტროლოს სიჩქარე, პოზიციის სიზუსტე ძალიან ზუსტია, ძაბვის სიგნალი შეიძლება გარდაიქმნას ბრუნვისკენ და სიჩქარით, საკონტროლო ობიექტის მართვისთვის.სერვოძრავის როტორის სიჩქარე კონტროლდება შეყვანის სიგნალით და შეუძლია სწრაფად რეაგირება. იგი გამოიყენება როგორც აღმასრულებელი ელემენტი ავტომატური კონტროლის სისტემაში და აქვს დამახასიათებელი მცირე ელექტრომექანიკური დროის მუდმივი, მაღალი ხაზოვანი და საწყისი ძაბვა და ა.შ.. მიღებული ელექტრო სიგნალი შეიძლება გარდაიქმნას ძრავის ლილვის კუთხურ გადაადგილებაში ან კუთხის სიჩქარით.Dc და ac servo motors– ზე დაყოფა, მისი ძირითადი მახასიათებლები ის არის, რომ, როდესაც სიგნალის ძაბვა ნულია, არ არსებობს ბრუნვის ფენომენი, ბრუნვის გაზრდისა და ერთიანი დაცემის სიჩქარე.
ძირითადი ინფორმაცია
ჩინური სახელი
servo motor
უცხოური სახელები
servo motor
ტიპი აღჭურვილობა
გამოიყენეთ შემთხვევები
ავტომატური კონტროლის სისტემა

კატალოგი
1 მუშაობის პრინციპი
2 განვითარების ისტორია
3 შერჩევის შედარება
4 გამართვის მეთოდი
5 შესრულების შედარება
6 შერჩევის გაანგარიშება
7 დამუხრუჭების რეჟიმი
8 წერტილები ყურადღებისთვის
მახასიათებლების 9 შედარება
10 გამოყენების ფარგლები
11 ძირითადი ფუნქციები
12 უპირატესობები
შეცვალეთ ამ განყოფილების სამუშაო პრინციპი
1. სერვო მექანიზმი გამოიყენება პოზიციის, ორიენტაციის,

ავტომატური მართვის სისტემა, რომელშიც გამომავალი კონტროლირებადი რაოდენობა, როგორიცაა სახელმწიფო, შეუძლია დაიცვას შეყვანის მიზანში თვითნებური ცვლილებები (ან მოცემული მნიშვნელობა).პულსის პოზიციონირება, ამის გაგება, ძირითადად, შეუძლია სერვოძრავას მიიღოს პულსი, გადაბრუნდება შესაბამისი თვალსაზრისის ერთი პულსი, ისე, რომ მოახდინოს გადაადგილების გაცნობიერება, რადგან, თვით სერვოძრავის ფუნქციას აქვს პულსი, ასე რომ თითოეული ბრუნვა სერვოძრავის კუთხე, გაგზავნეთ პულსის შესაბამისი რაოდენობა, ამ გზით, და სერვოძრავა მიიღოს პულსი, რომელიც ქმნის ექოს, ან დახურულ მარყუჟს, შედეგად, სისტემამ იცის, რამდენი პულსია გაგზავნილი სერვოძრავაზე , რამდენი დატვირთვაა პულსი ისევ ამავე დროს, ამ გზით, შეიძლება იყოს ძალიან ზუსტი კონტროლი ძრავის როტაციაზე, რომ გააცნობიეროს ზუსტი პოზიციონირება, შეიძლება მიაღწიოს 0.001 მმ.Dc servo motor იყოფა ფუნჯით და ჯაგრისით ძრავად.ჯაგრისის ძრავის დაბალი ღირებულება, მარტივი სტრუქტურა, დიდი საწყისი ბრუნვის სიჩქარე, ფართო სიჩქარის დიაპაზონი, მარტივი კონტროლი, სჭირდება შენარჩუნება, მაგრამ შენარჩუნება არ არის მოსახერხებელი (ნახშირბადის ფუნჯი), ელექტრომაგნიტური ჩარევა, გარემოსდაცვითი მოთხოვნები.ამრიგად, იგი შეიძლება გამოყენებულ იქნას ზოგადად მგრძნობიარე ზოგადი სამრეწველო და სამოქალაქო პროგრამებში.



ფუნჯის ძრავა მცირე ზომის, მსუბუქი წონა, დიდი გამომავალი, სწრაფი რეაგირება, დიდი სიჩქარე, მცირე ინერცია, გლუვი როტაცია, სტაბილური ბრუნვა.კონტროლი რთული, დაზვერვის მარტივია, ხოლო ელექტრონული კომუტაცია მოქნილია, რაც შეიძლება იყოს კვადრატული ტალღის შემცირება ან სინუსური ტალღის გადაადგილება.საავტომობილო მოვლა უფასო, მაღალი ეფექტურობით, დაბალი ტემპერატურით, მცირე ელექტრომაგნიტური გამოსხივებით, გრძელი სიცოცხლით, შეიძლება გამოყენებულ იქნას სხვადასხვა გარემოში.
2, ac servo motor არის brushless ძრავა, დაყოფილია სინქრონული და ასინქრონული ძრავით, მიმდინარე მოძრაობის კონტროლისთვის გამოიყენება სინქრონული ძრავა, მისი სიმძლავრის დიაპაზონი დიდია, შეუძლია ბევრი ძალა.მაღალი ინერცია, დაბალი მაქსიმალური ბრუნვის სიჩქარე და ენერგიის მატებასთან ერთად სწრაფად მცირდება.ამიტომ, იგი შესაფერისია დაბალი სიჩქარითა და გლუვი მუშაობით.
3. სერვოძრავის შიგნით როტორის მუდმივი მაგნიტია. სამფაზიანი ელექტროენერგია, რომელსაც აკონტროლებს მძღოლი, U / V / W, ქმნის ელექტრომაგნიტურ ველს.სერვოძრავის სიზუსტე დამოკიდებულია კოდირების სიზუსტეზე (ხაზის ნომერი).
განვითარების ისტორია
ვინაიდან გერმანიის Rexroth კომპანიის ინდტრატის განყოფილება MANNESMANN- ი 1978 ჰანოვერის სავაჭრო ბაზრობაში

MAC მუდმივი მაგნიტი AC სერვოძრავა და წამყვანი სისტემა ოფიციალურად დაინერგა შანხაიში, რაც აღნიშნა, რომ AC ახალი სერვის ტექნოლოგიის ამ ახალმა თაობამ პრაქტიკულ ეტაპზე შევიდა.შუა და გვიანდელი 1980- სთვის კომპანიებს ჰქონდათ პროდუქციის სრული ასორტიმენტი.მთელი სერვო ბაზარი გადავიდა ac სისტემებში.ადრეული სიმულაციური სისტემები, როგორიცაა ნულოვანი დრიფტი, ინტერფერონის საწინააღმდეგო ჩარევა და საიმედოობა, სიზუსტე და მოქნილობა, ისევე როგორც არასაკმარისი, სრულად არ აკმაყოფილებს მოძრაობის კონტროლის მოთხოვნებს, ბოლო წლებში, როგორც მიკროპროცესორი, ახალი ტიპის ციფრული სიგნალის პროცესორის გამოყენება (DSP). ), ციფრული მართვის სისტემა, საკონტროლო ნაწილი შეიძლება სრულად განხორციელდეს პროგრამული უზრუნველყოფით, სახელწოდებით dc servo system, სამფაზიანი მუდმივი მაგნიტი ac სერვო სისტემა.

დღემდე, მაღალი ხარისხის ელექტრული სერვო სისტემების უმეტესი ნაწილი იღებს მუდმივ მაგნიტურ სინქრონულ AC სერვოძრავას, ხოლო მართვის უმეტესი მძღოლები იღებენ სწრაფ და ზუსტ ციფრულ პოზიციურ სერვო სისტემებს.ტიპიური მწარმოებლები მოიცავს გერმანიის Siemens- ს, შეერთებული შტატების კოლმორგენს და იაპონიის პანასონურ და იასკავას.
მცირე ac სერვოძრავა და დრაივერი იასტავას ძრავით იწარმოება იაპონიაში. მათ შორის, D სერია შესაფერისია CNC ჩარხებისთვის (მაქსიმალური სიჩქარეა 1000r / წთ, ბრუნვის სიჩქარეა 0.25 ~ 2.8n.m), ხოლო R სერია შესაფერისია რობოტებისთვის (მაქსიმალური სიჩქარეა 3000r / წთ, ბრუნვის რაოდენობა არის 0.016 ~ 0.16n.m) ).ამის შემდეგ დაინერგა M, F, S, H, C და G ექვსი სერია.ახალი D სერია და R სერია დაინერგა 1990- ში.მართკუთხა ტალღის დრაივის ძველი სერიიდან, 8051 MCU კონტროლიდან სინუსოიდული ტალღის დრაივზე, 80C, 154CPU და კარიბჭის მასივის ჩიპის კონტროლი, ბრუნვის ცვალებადობა 24% -დან 7 %– მდე და აძლიერებს საიმედოობას.ამ გზით, მხოლოდ რამოდენიმე სერიის (0.05 ~ 6kWW) ელექტრული სისტემის შექმნისთვის საჭიროა მხოლოდ რამდენიმე წელი, რომ შეხვდეს სამუშაო აპარატებს, მართვის მექანიზმს, შედუღების რობოტებს, ასამბლეის რობოტებს, ელექტრონულ კომპონენტებს, გადამამუშავებელ დანადგარებს, სტამბას, მაღალ- სიჩქარის ლიკვიდაცია მანქანა, ლიკვიდაცია მანქანა და სხვა სხვადასხვა საჭიროებები.
Fanuc, იაპონური კომპანია, რომელიც ცნობილია CNC ჩარხების წარმოებისთვის, ასევე შემოიღო s-სერიები (13 სპეციფიკაციები) და l- სერიები (5 სპეციფიკაციები) მუდმივი მაგნიტი ac servo motors შუა რიცხვებში 1980.L სერიებს გააჩნია ინერციის მცირე დრო და მექანიკური დრო მუდმივია და შესაფერისია სერვის სისტემებისთვის, რომლებიც საჭიროებენ სპეციალურ სწრაფ რეაგირებას.

იაპონური სხვა მწარმოებლებისგან, როგორიცაა mitsubishi motors (hc-kfs, hc-mfs, hc-sfs, hc-rfs და hc-ufs სერიები), Toshiba seiki (SM სერია), okuma რკინის სამუშაოები (BL სერია), sanyo Electric (BL სერია) და რიშის ელექტრო (S სერია) ასევე შევიდნენ მუდმივ მაგნიტ სერ სერვის სისტემურ კონკურსში.
Rexroth– ის ინდრამატის განყოფილების MAC სერიის ac servo motors– ს აქვს 7 ჩარჩოს ზომები და 92 სპეციფიკაციები
სიმენსის IFT5 სერიის სამფაზიანი მუდმივი მაგნიტი AC სერვოძრავები იყოფა სტანდარტული ტიპისა და მოკლე ტიპის

Ac servo motor და brushless dc servo motor განსხვავების ფუნქციით: ac servo უკეთესია, რადგან ეს არის სინუსური ტალღის კონტროლი, ბრუნვის რბოლა მცირეა.Dc servo არის ტრაპეციული ტალღა.მაგრამ dc servo არის მარტივი და იაფი.
მაღალი სიჩქარის შახტის მაქსიმალური სიჩქარე არ აღემატება 1500r / წთ
გადაცემის პერიფერიული სიჩქარე არ აღემატება 10m / s;
სამუშაო გარემოს ტემპერატურაა -40 ° C -45 ° C;
მისი მოქმედება შესაძლებელია როგორც წინ, ასევე საპირისპირო მიმართულებით.

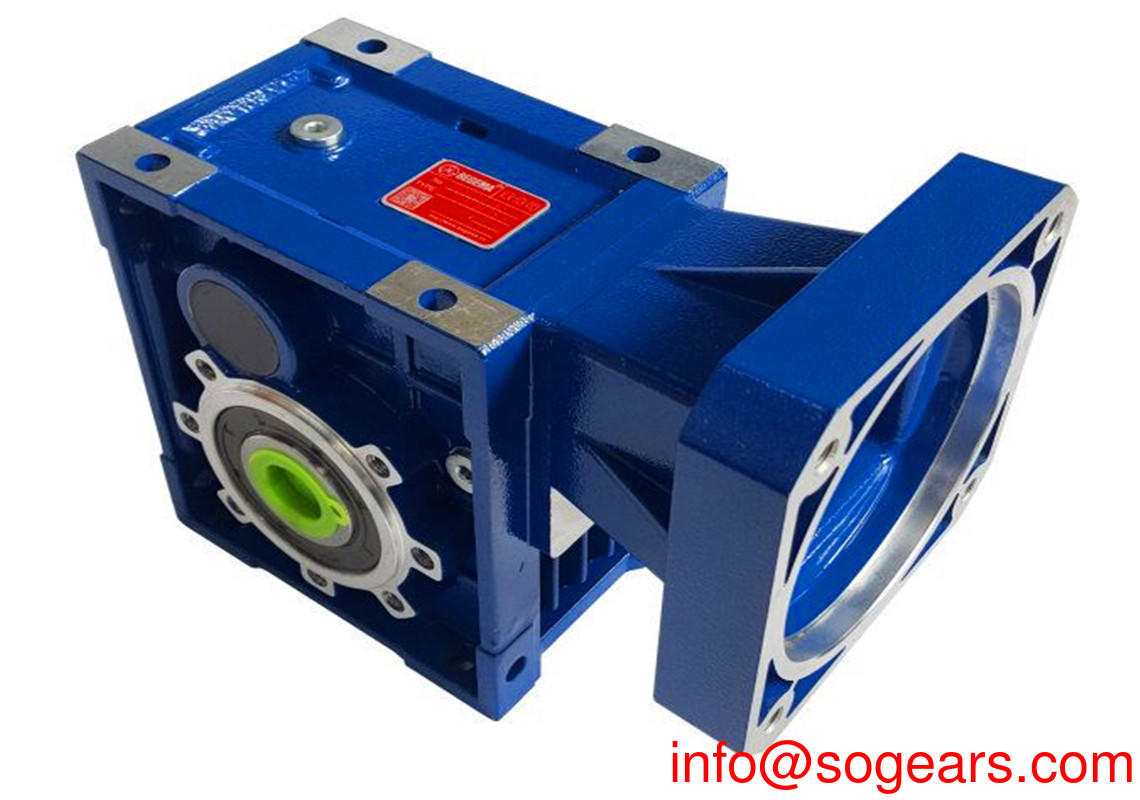
სტეპერიანი საავტომობილო პლანეტარული გადაცემათა კოლოფი სპეციფიკაციები:
NGW ერთსაფეხურიანი სტეპერიანი ძრავის პლანეტარული გადაცემათა კოლოფი: NGW11, NGW21, NGW31, NGW41, NGW51, NGW61, NGW71, NGW81, NGW91, NGW101, NXWXX
NGW ორსაფეხურიანი სტეპერიანი ძრავის პლანეტარული გადაცემათა კოლოფი: NGW42, NGW52, NGW62, NGW72, NGW82, NGW92, NGW102, NGW112, NGW122
NGW სამსაფეხურიანი სტეპერიანი ძრავის პლანეტარული გადაცემათა კოლოფი: NGW73, NGW83, NGW93, NGW103, NGW113, NGW123



NGW სტეპერ ძრავის პლანეტარული გადაცემათა კოლოფი სპეციფიკაციები:
სპეციფიკაციები სტეპერიანი საავტომობილო პლანეტარული გადაცემათა კოლოფი იყოფა 12 ჩარჩო ნომრებზე გადაცემის კოეფიციენტის, სიმძლავრის და ბრუნვის და ერთსაფეხურიანი, ორმაგი და სამსაფეხურიანი ტრანსმისიის მიხედვით. არსებობს 27 ჩარჩოს ნომრები და 58 სიჩქარის კოეფიციენტები. დეტალები შემდეგია:
სტეპერიანი საავტომობილო პლანეტარული გადაცემათა კოლოფი იყოფა ერთსაფეხურიანი, ორფაზიანი და სამსაფეხურიანი ტრანსმისიები: ერთსაფეხურიანი მოდელებია: NGW11 სტეპერიანი ძრავის პლანეტარული გადაცემათა კოლოფი NGW21, NGW31, NGW41, NGW51 სტეპერიანი ძრავის პლანეტარული გადაცემათა კოლოფი NGW61, NGW71, NGW81, NGW91, NGW101, NGW111, NGW121, NGWXNUMX, NGWXXXUMXXXXX , NGWXNUMX, NGWXNUMX;

გამართვის მეთოდი
1. ინიციალიზაციის პარამეტრები
გაყვანილობის დაწყებამდე პარამეტრების ინიციალიზაცია.
საკონტროლო ბარათზე: შეარჩიეთ მართვის რეჟიმი;PID პარამეტრების ნულის გადატვირთვა;გამორთეთ ჩართვის ჩართვის სიგნალი, როდესაც ჩართულია საკონტროლო ბარათი;დაზოგეთ ეს სახელმწიფო იმისათვის, რომ კონტროლის ბარათი ამ მდგომარეობაში იყოს, როდესაც იგი კვლავ ჩართულია.
სერვოძრავაზე: დააყენეთ კონტროლის რეჟიმი;გარე კონტროლის ჩართვის დაყენება;კოდირების სიგნალის გამომავალი სიჩქარის კოეფიციენტი;დააყენეთ პროპორციული კავშირი საკონტროლო სიგნალსა და ძრავის სიჩქარეს შორის.ზოგადად, მიზანშეწონილია, რომ სერვო ოპერაციის მაქსიმალური დიზაინის სიჩქარე შეესაბამებოდეს 9V საკონტროლო ძაბვას.მაგალითად, yamyang ადგენს სიჩქარეს, რომელიც შეესაბამება 1V ძაბვას, ხოლო ქარხნის მნიშვნელობა არის 500. თუ მხოლოდ გინდათ რომ ძრავა მუშაობდეს 1000 RPM ქვემოთ, დააყენეთ ეს პარამეტრი 111.


2, კავშირი
გამორთეთ საკონტროლო ბარათი და დააკავშირეთ სიგნალის ხაზი საკონტროლო ბარათსა და სერვოას შორის.შემდეგი ხაზები უნდა იყოს დაკავშირებული: საკონტროლო ბარათის ანალოგური გამომავალი ხაზი, ჩართოთ სიგნალის ხაზი, სერვო გამოყვანის კოდირების სიგნალის ხაზი.საავტომობილო და საკონტროლო ბარათი (ისევე როგორც კომპიუტერი) იკვებება გაყვანილობის სწორად შემოწმების შემდეგ.ამ ეტაპზე ძრავა უნდა იყოს სტაციონალური და შეიძლება ადვილად იქცეს გარე ძალებით. თუ არა, შეამოწმეთ ჩართვითი სიგნალის პარამეტრი და გაყვანილობა.როტაცია მოტორი გარე ძალით, შეამოწმეთ შეძლებს თუ არა საკონტროლო ბარათს სწორად ამოიცნოს ძრავის პოზიციის ცვლილება, წინააღმდეგ შემთხვევაში შეამოწმეთ კოდირება და კოდირება

3. სცადეთ მიმართულება
დახურული მარყუჟის მართვის სისტემისთვის, თუ უკუკავშირი სიგნალი არ არის სწორი მიმართულებით, შედეგები უნდა იყოს სავალალო.ჩართეთ სიგნალი სერვოზე ჩართვის კონტროლის ბარათით.ეს სერვო უნდა მოძრაობდეს უფრო დაბალი სიჩქარით, რაც არის ლეგენდარული "ნულოვანი დრიფტი".ნულოვანი დრიფტის ჩახშობის მიზნით, საკონტროლო ბარათზე არსებობს ინსტრუქციები ან პარამეტრები.გამოიყენეთ ეს ინსტრუქცია ან პარამეტრი იმის დასადგენად, შესაძლებელია თუ არა ძრავის სიჩქარე და მიმართულება ამ ინსტრუქციით (პარამეტრით) კონტროლი.თუ მისი კონტროლი შეუძლებელია, შეამოწმეთ ანალოგური გაყვანილობა და კონტროლის რეჟიმის პარამეტრის პარამეტრი.დაადასტურეთ პოზიტიური რიცხვის მიცემა, ძრავის წინ როტაცია, კოდირების რაოდენობის გაზრდა;უარყოფითი რიცხვის გათვალისწინებით, ძრავა ბრუნდება უკან და კოდირდება კოდირების კოდი.თუ ძრავა დატვირთულია და ინსულტი შეზღუდულია, არ გამოიყენოთ ეს მეთოდი.ტესტი არ მოგცემთ ძალიან ბევრ ძაბვას, რეკომენდებულია 1V- ის პირობებში.თუ მიმართულება არ შეესაბამება, საკონტროლო ბარათზე ან ძრავზე შეიძლება შეიცვალოს პარამეტრები, რათა მათ თანმიმდევრულად მოხდეს.

4. დათრგუნეთ ნულოვანი დრიფტი
დახურული მარყუჟის კონტროლის პროცესში, ნულოვანი დრიფტის არსებობა გარკვეულ გავლენას მოახდენს საკონტროლო ეფექტზე, და უმჯობესია მისი შეკავება.საკონტროლო ბარათის ან სერვო კონტროლის პარამეტრების კონტროლი ნულოვანი დრიფტისთვის, ფრთხილად მორგებული ისე, რომ ძრავის სიჩქარე ნულის ტოლია.იმის გამო, რომ ნულოვანი დრიფტი თავისთავად აქვს გარკვეულწილად შემთხვევითობას, ამიტომ არ არის აუცილებელი ძრავის სიჩქარის მოთხოვნა აბსოლუტურად ნულოვანია.
5. ჩამოაყალიბეთ დახურული მარყუჟის კონტროლი
კიდევ ერთხელ, სერვო სიგნალი იხსნება საკონტროლო ბარათის მეშვეობით, ხოლო მცირე პროპორციული მოგება შედის საკონტროლო ბარათზე. რაც შეეხება რამდენად მცირეა მოგება, მისი განსაზღვრა შესაძლებელია მხოლოდ გრძნობით. თუ ნამდვილად არ ხართ დარწმუნებული, შეიყვანეთ საკონტროლო ბარათის მიერ დაშვებული მინიმალური მნიშვნელობა.ჩართეთ მართვის ბარათისა და სერვოის ჩართვის სიგნალი.ამ ეტაპზე, ძრავას უნდა შეეძლოს უხეშად დაიცვას მოძრაობის ინსტრუქცია.

6. დახურეთ მარყუჟის პარამეტრების მორგება
საკონტროლო პარამეტრების ჯარიმა დაყენება იმის უზრუნველსაყოფად, რომ ძრავა მოძრაობს საკონტროლო ბარათის მითითებების შესაბამისად, და სამუშაოს ეს ნაწილი, მეტი გამოცდილება, აქ მხოლოდ გამოტოვება შეიძლება.
შეცვალეთ ამ განყოფილების შესრულების შედარება
შესრულების შედარება სერვოძრავასა და სტეპ ძრავას შორის

როგორც ღია მარყუჟის მართვის სისტემა, სტეპერ ძრავას არსებითი ურთიერთობა აქვს თანამედროვე ციფრული მართვის თანამედროვე ტექნოლოგიასთან.სტეპ ძრავა ფართოდ გამოიყენება ციფრული კონტროლის სისტემაში ჩინეთში.ყველა ციფრული ac სერვო სისტემის გამოჩენით, ac servo motor უფრო და უფრო ხშირად გამოიყენება ციფრული კონტროლის სისტემაში.ციფრული კონტროლის განვითარების ტენდენციასთან ადაპტაციის მიზნით, სტეპერ ძრავა ან სრული ციფრული AC სერვო ძრავა გამოიყენება როგორც აღმასრულებელი ძრავა მოძრაობის კონტროლის სისტემაში.მიუხედავად იმისა, რომ ორივე მსგავსია საკონტროლო რეჟიმში (პულსის მატარებელი და მიმართულების სიგნალი), არსებობს მნიშვნელოვანი განსხვავებები შესრულებასა და გამოყენებაში.შეადარეთ შედარება ახლა ორივეს მომსახურების შესრულებასთან დაკავშირებით.

გადაცემის კოეფიციენტია: 2.0, 3.15, 3.55, 4, 4.5, 5, 5.6, 6.3, 7, 1.8, 9, 10, 11.2, 12.5;
ორსაფეხურიანი მოდელებია: NGW42, NGW52, NGW62, NGW72, NGW82, NGW92, NGW102, NGW112, NGW122;
გადამცემი შეფარდება არის: 14, 16, 18, 20, 22.4, 25, 28, 31.5, 35.5, 40, 45.50, 56, 63, 71, 80, 90, 100, 112, 125, 140, 160;

სამ დონის მოდელებია: NGW73, NGW83, NGW93, NGW103 გადაცემის სტეპერ ძრავა პლანეტარული გადაცემათა კოლოფი NGW113, NGW123 სტეპერ ძრავა პლანეტარული გადაცემათა კოლოფი;
გადაცემის კოეფიციენტია: 180, 200, 224, 250, 280, 315, 355, 400













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![]()
საუკეთესო მომსახურება ჩვენი გადამცემი წამყვანი ექსპერტიდან პირდაპირ თქვენს ყუთში.
ჩვენი სერვისი
დაუკავშირდა
Yantai Bonway Manufacturer შპს კო
ANo.160 Changjiang Road, Yantai, Shandong, China(264006)
T + 86 535 6330966
W + 86 185 63806647